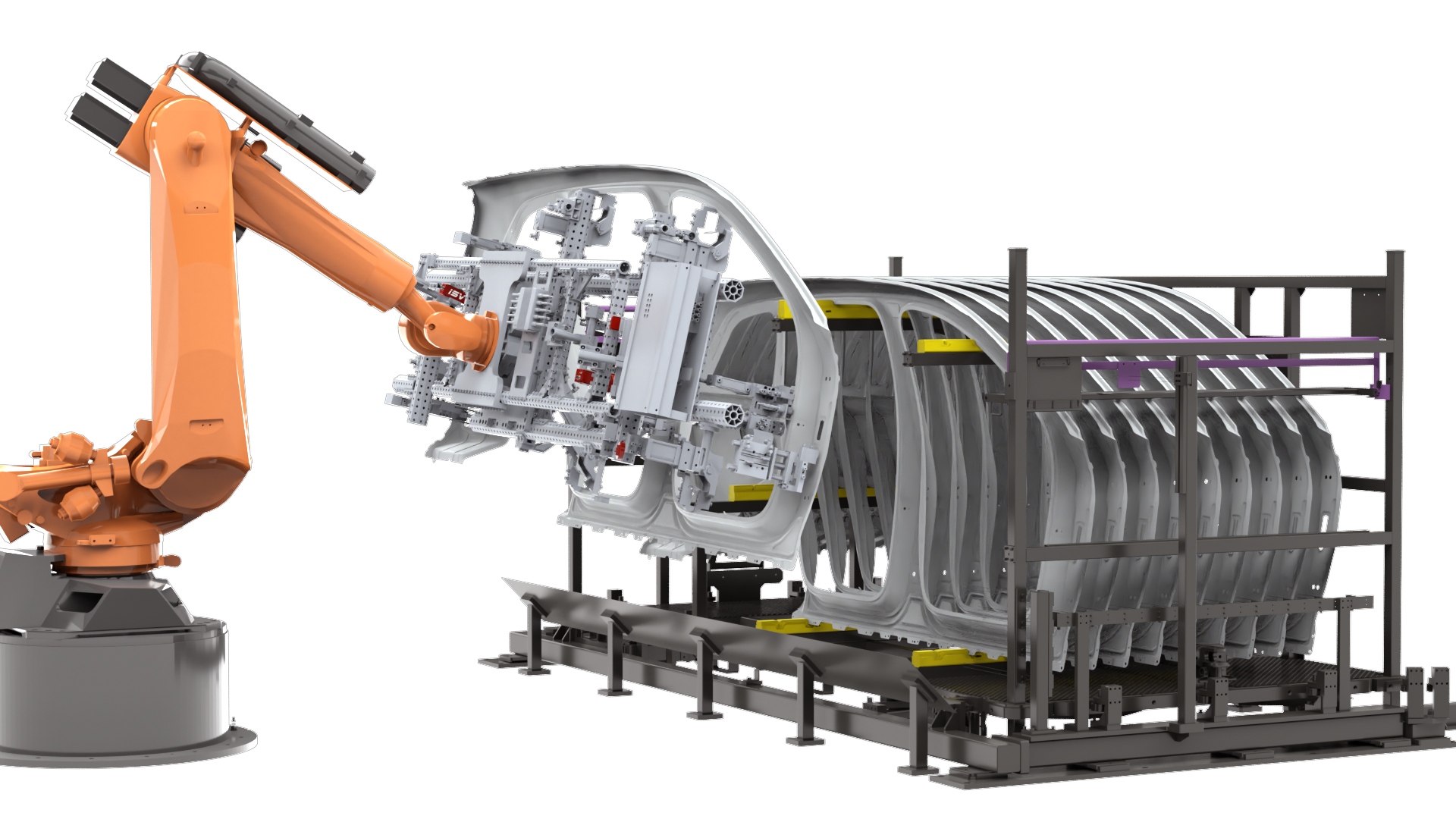
视觉引导搬运上料方案,基于图像多特征定位及3D点云配准定位等多技术路线,实现了引导机器人自适应调整轨迹从器具内抓取零件的功能,取代了传统的人工搬运模式。不仅能够降低对器具设计复杂度的要求,同时还能降低人员投入成本,实现降本增效。

视觉引导搬运上料方案,基于图像多特征定位及3D点云配准定位等多技术路线,实现了引导机器人自适应调整轨迹从器具内抓取零件的功能,取代了传统的人工搬运模式。不仅能够降低对器具设计复杂度的要求,同时还能降低人员投入成本,实现降本增效。
EMS、FDS等零件搬运场景 ;
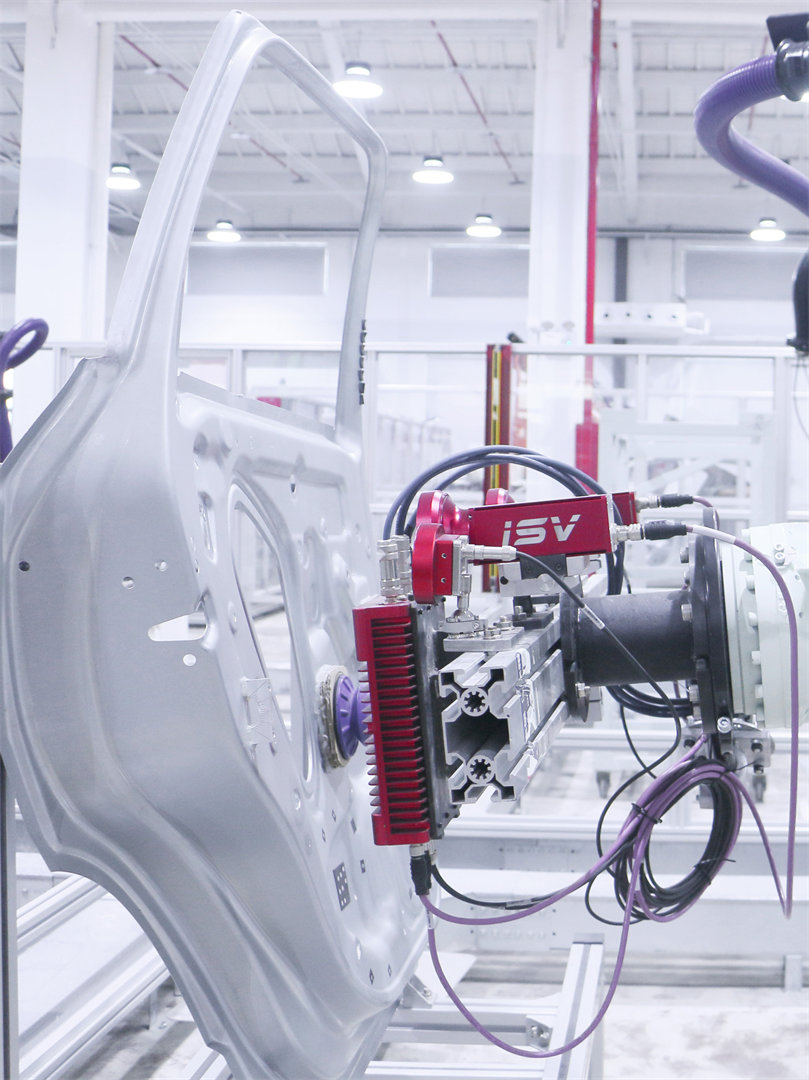
侧围、顶盖等料架摆放零件搬运场景;
横梁、加强件等料箱无序摆放零件搬运场景。
多种技术路线组合,覆盖不同类型、颜色、尺寸零件;
对器具的状态适应性更强,能够实现基于物流普通料架的抓取,同时可对其进行状态监控;
全盘考虑抓取自动化影响因素,实现工位极低的故障率。